SSI通信協議
SSI通訊協議為縮寫,其全稱為同步串行接口( Synchronous Serial interface )。 SSI通訊的幀格式如圖1所示,數據傳輸採用同步方式,在空閑階段不發生數據傳輸的時候時鐘和數據都保持高電位,在 個脈衝的下降沿觸發編碼器載入發送數據,然後每一個時鐘脈衝的上升沿編碼器送出數據,數據的高位在前,低位在后,當傳送完所有的位數以後時鐘回到高電平,數據也對
應回到高電平.
圖中有幾個參數定義如下:
T為時鐘的脈衝頻率,介為數據傳輸間隔. Tm為單穩觸發時間.N為為傳輸位數.傳輸的位數可以是任意的,但實際使用中單圈編碼器採用13位,多圈採用25位.對於從方編碼器而言是無法事先知道主方發送的時鐘脈衝個數的,因而無法確定幀的起始位和停止位.解決問題的方法是採用高電位保持一段的時間內沒有變化作為幀結束標誌.Tm單穩時間就是指這個時間.在實際應用中可以採用一個單穩(軟件或者硬件),把時鐘輸人作為單穩的輸入,通過單穩輸出控制SSI的數據輸出狀態:單穩一旦置位,SSI的輸出狀態就要回到初始狀態,準備開始下一個數據的循環過程。
BISS通信協議
BiSS通信協議是一種全雙工同步串行總線通信協議,專門為滿足實時、雙向、高速的傳感器通信而設計,在硬件上兼容工業標準SSI(同步串行接口協議)總線協議。其典型應用是在運動控制領域實現伺服驅動器與編碼器通信。BiSS由德國IC-HAUS公司開發,現已成為傳感器通信協議的國際化標準。BiSS通信協議目前的版本是BISS-C。
關鍵技術特征:
1、二線串行同步數據總線,採用RS422接口,波特率達到10Mbit/s;採用LVDS接口, 波特率>10Mbit/s,這反映了BiSS有高的響應速度;
2、通信效率高,每10uS傳輸超過64個比特,有效負載率大於80%。這反映出BiSS能承載高分辨率編碼器數據;
3、線路時分復用,包括每個通信週期傳輸一幀的數據通信信道和傳輸一個幀位的寄存器通信信道。其中,寄存器通信和數據通信完全獨立,互不干涉。對於不需要寄存器通信的應用場合,可以使用BiSS-C Unidirectional版本。這個版本的協議沒有寄存器通信。這反映了採用BiSS的控制系統有更好的穩定性和便利性。
4、多種安全機制確保數據可靠,BiSS的延遲補償技術能補償傳輸線帶來的信號延遲,採用兩組CRC生成多項式分別對傳感器數據與寄存器數據進行校驗。BiSS協議幀還包括一位報警位和一位錯誤位,CRC生成多項式可自定義。這反映了BiSS傳輸可靠,採用BiSS的控制系統可靠。
5、數據同步,BiSS利用時鐘信號同步傳感器數據,傳感器在 個時鐘脈衝到來時進行數 據更新,每一幀到達後續電子設備的數據其傳輸延遲都是相同的,方便後續電子設備進行時延補償,特別適合電機控制等對時間位置關係要求苛刻的應用場合。這反映BiSS對於編碼器精度的影響很小,有助于提高控制系統的高速特性。
6、組網能力,通過BiSS可以構成單總線傳感器環網,一個通信週期採集全部傳感數據,並且信號採集是同步的。這反映BiSS的擴展性和前瞻性。
7、即插即用,BiSS支持從寄存器讀出編碼器參數,來配置數據通信。凡是支持BiSS標準EDS和Profile的編碼器和控制系統都可以直接通信,無需修改任何程序。
組網方式:
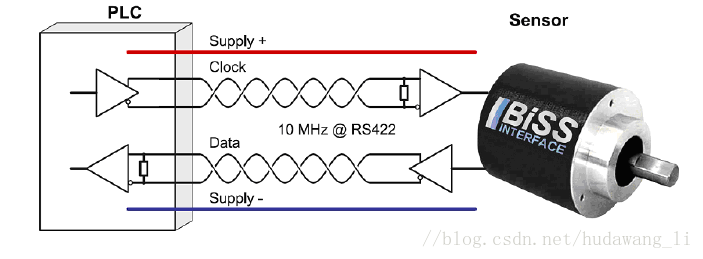
圖中是BiSS的基本組網方式,叫point-to-point方式。後續電子設備(圖中為PLC)通過差分信號向傳感器提供時鐘,傳感器同步地通過差分信號向後續電子設備發出傳感數據。在BiSS協議中後續電子設備被稱為Master,傳感器被稱為Slave。在point-to-point方式下,Master可以接收Slave的數據,同時與Slave進行雙向數據通信。
幀結構與數據通信:
描繪了point-to-point組網時的BiSS通信幀。MA由Master發出用於驅動通信,SL是Slave發出的數據信號。完成1個BiSS通信幀表示Master收到1幀數據。
EnDat協議
EnDat接口是HEIDENHAIN專為編碼器設計的數字式、全雙工同步串行的數據傳輸協議,它不僅能為增量式和 式編碼器傳輸位置值,同時也夠傳輸或更新存儲在編碼器中的信息,或保存新的信息。由於使用了串行傳輸方式,所以只需四條信號線,在後續電了設備的時鐘激勵下,數據信息被同步傳輸。數據類型(位置值、參數、診斷信息等)由後續電子設備發送給編碼器的模式指令選擇決定。
特點:
1. 傳輸位置值與附加信息可同時傳輸;附加信息的類型可通過存儲地址選擇碼選擇。
2. 編碼器數據存儲區域包括編碼器製造商參數、OEM廠商參數、運行參數、運行狀態,便於系統實現參數配置。
3. EnDat2.2編碼器實現了全數字傳輸,增量信號的處理在編碼器內部完成(內置14Bit細分),提高了信號傳輸的質量和可靠性,可實現更高的分辨率。
4. 監控和診斷功能,報警條件包括:光源失效、信號幅值不足、位置計算錯誤、運行電壓太低或太高、電流消耗太大等;當編碼器的一些極限值被接近或超過時提供警告信號。
5. 更寬的電壓範圍(3.6-14V)和傳輸速率(16M)。
EnDat接口編碼器數據採集原理圖
數據傳輸格式
在每一幀同步數據傳輸時一個數據包被髮送,傳輸循環從時鐘的 個下降沿開始測量值被保存,計算位置值。在兩個時鐘脈衝(2T)后,後續電子設備發送模式指令“編碼器傳輸位置值”(帶或不帶附加信息)。
在計算出了 位置值后,從起始位開始編碼器向後續電子設備傳輸數據,後續的錯誤位F1和F2(只存在於EnDat2.2指令中)是為所有的監控功能和故障監控服務的群組信號,他們的生成相互獨立,用來表示可能導致不正確位置信息的編碼器故障導致故障的確切原因保存在“運行狀態”存儲區,可以被後續電了設備查詢。
從 位開始, 位置值被傳輸,數據的長度由使用的編碼器類型決定。傳輸位置值所需的時鐘脈衝數保存在編碼器製造商的參數中。位置值數據的傳輸以循環冗余檢測碼結束。
HIPERFACE協議
HIPERFACE是高性能接口(High Performance Interface)的縮寫,是SICK-STEGMANN電機反饋系統的標準接口。該接口專為數字驅動控制而研發,為用戶提供標準化的簡化型機械和電氣接口。
特點:
1、僅在速度控制器上配備一個電氣接口,適用於所有應用。速度控制器和電機反饋系統間只需使用同一類型電纜進行連接。
僅通過一個電氣接口即可實現低端及高端應用。
2、混合接口
模擬量過程數據通道上的混合接口:正弦信號和餘弦信號通過該接口進行差分傳輸,且幾乎沒有延遲。
雙向參數通道上的混合接口(與RS485規格一致):用於傳輸 位置信息和其他各種參數。
3、僅8條電線。
4、配備電子類型標籤,用於識別電機反饋及存儲電機反饋系統中的驅動相關信息。
5、寬溫度範圍,具有較強的耐衝擊和抗振動性能,抗電磁干擾。具有緊湊的尺寸,可安裝于伺服電機內部。
6、模擬量正弦/餘弦信號可進行速度控制,低速應用時可提供較高分辨率,高速控制時可提供足夠低的信號帶寬。
7、電纜長度 為100 m
8、在機械齒輪應用的位置控制方面,具有相同物理尺寸的電機反饋系統可作為 式多圈型編碼器使用, 定位高達4096轉。
HIPERFACE電機反饋系統同時使用了增量型編碼器和 型編碼器,兼具這兩種編碼器的優點。
首先, 位置值僅當設備通電並與控制器里的外部計數器通信時才產生,一一通過與RS485規格相符的基於總線的參數接口—增量計數器在這 位置值基礎上,對模擬量正弦/餘弦信號進行增量計數。使用高線性的正弦和餘弦信號可獲得速度控制所需的高分辨率(反正切在控制器中形成)。然而,此時傳輸的信號頻率仍然相對較低。例如:每轉512週期,即使是在12000 rpm轉速時頻率也僅為102.4kHz,這樣即使是長距離也可輕鬆傳輸。
數據格式
異步接口的數據基本格式如下:
1個起始位
8個數據位( 有效位在前)
1個停止位
可設置的奇偶性:奇,偶,無
可設置的波特率:600, 1200, 2400, 4800, 4800, 9600, 19200, 38400波特
參數通常預設為:
9600波特
奇偶性二1(如果數據位的總和為奇數)
多摩川協議
多摩川 式編碼器能夠實現單圈23bit多圈16bit總計39bit的高解析度。
數據通訊是基於485硬件接口標準NRZ協議,通訊波特率為2.5M的串行通訊。CRC循環循環冗余校驗數據,避免數據出錯導致異常的問題發生。通訊距離可達到20米。
編碼器具備狀態自檢功能,對於電池欠壓、失效、編碼器計數錯誤、過速度、碼盤故障等可通過編碼器狀態位讀取出來。
控制器或驅動器可通過單獨的指令對單圈數據或多圈重置零位,可清除故障標誌位。
內置768字節EEPROM,可擦寫一萬次以上,可用於存儲電機相關信息,對於伺服驅動器對電機參數的自動識別提供了可行的途徑。
多摩川串行 編碼器通訊數據結構:
串行波特率:2.5M
起始位:1bit
停止位:1bit
數據位:8bit
讀取編碼器單圈、多圈、全部數據、及復位狀態:
只需發送一個字節控制數據。
編碼器應答數據:
包括接收到的控制字,及編碼器狀態字、編碼器ID(能夠識別編碼器基本類型),及編碼器數據。 一個字節為對前面所有的數據進行CRC校驗。
讀取編碼器內部EEPROM數據:
需發送三個字節數據,讀取EEPROM數據控制字、EEPROM數據地址、CRC效驗碼。
編碼器應答數據或寫入數據:
結構包括EEPROM數據控制字、EEPROM數據地址、EEPROM數據、CRC效驗碼。
讀取一次編碼器全部數據需要60μS左右。為伺服電機提供高速度位置響應提供了可能。
————————————————
版權聲明:本文為CSDN博主「hudawang_li」的原創文章,遵循 CC 4.0 BY-SA 版權協議,轉載請附上原文出處鏈接及本聲明。
原文鏈接:
https://blog.csdn.net/hudawang_li/article/details/79626611